Chapter 3: Calibration of Sensors
Objective¶
- Understand what sensor calibration is and why it’s critical for localization and mapping.
- Understand What is intrinisic and extrnisic calibration.
- Perform intrinsic and extrinsic calibration using open-source tools.
The fundamental objective of sensor calibration in SLAM systems is to ensure accurate spatial perception by establishing precise mathematical relationships between sensor measurements and the physical world. As SLAM systems increasingly rely on multi-sensor fusion architectures, proper calibration becomes essential for maintaining spatial consistency across different sensing modalities. The goal is to minimize systematic errors that can propagate through the SLAM pipeline, ultimately affecting localization accuracy and map quality.
Current technological trends indicate a growing complexity in SLAM sensor configurations, with systems commonly integrating LiDAR, cameras, IMUs, wheel encoders, and other specialized sensors. Each sensor type introduces unique calibration challenges related to intrinsic parameters (internal characteristics) and extrinsic parameters (spatial relationships between sensors). The industry is moving toward more robust, automated calibration procedures that can adapt to environmental changes and sensor degradation over time.
Common Reference Frames in Sensor Fusion and Calibration¶
In localization, mapping, and multi-sensor fusion, consistent definition and transformation between reference frames is essential. Each frame represents a coordinate system attached to a specific entity (e.g., world, robot, sensor). Below are the most common frames used in SLAM and calibration systems.
-
World Frame: The World frame (or Map frame) is a global, fixed reference system used to express the absolute position and orientation of the robot and environment.The Zₚ axis typically points upward (or opposite to gravity, depending on convention).The origin is arbitrarily set at the system initialization, often at the robot’s or camera’s starting pose.
-
Odome Frame: is a local reference frame used to track the robot’s motion over time relative to its starting position. It is typically updated incrementally by wheel encoders, visual odometry, or other motion estimation sensors.
-
Body Frame: represents the robot’s physical body, typically attached to the IMU or the vehicle chassis. It acts as the central reference for all onboard sensors (LiDAR, cameras, GNSS, etc.).In a right-handed coordinate system, the x-axis points forward in the robot’s motion direction, the y-axis points to the left, and the z-axis points upward.
-
Camera Frame: The Camera Frame (C) is centered at the optical center of the camera and follows computer vision conventions. The z-axis points forward along the optical axis, x-axis points right, and y-axis points downward, aligned with image coordinates. This differs from the body or IMU frame (where z points upward). In multi-camera systems, each camera (C1,C2) has its own pose relative to the body frame, defined by the extrinsic transform.This frame is fundamental for projecting 3D world points onto the image plane.
-
Image (Pixel) Frame: The Image Frame (I) is a 2D coordinate system on the camera’s image plane, where each point corresponds to a pixel location. The origin (u=0,v=0) is typically at the top-left corner, with the u-axis pointing right and v-axis pointing down. 3D points from the camera frame are projected into this frame using the camera intrinsic matrix (K) and distortion model.
Camera calibration¶
Intrinsic calibration
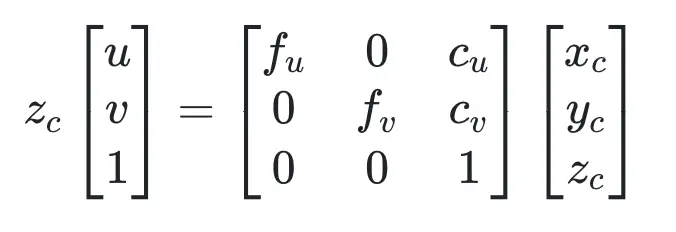
Intrinsic calibration estimates the camera’s internal parameters, describing how 3D points in the camera frame are projected onto the 2D image plane.we use camera intrinsic parameter matrix, describes some of the physical properties of the camera lens. It is a 3x3 matrix with the following form:

-
fu and fv (fx and fy): These two parameters are the focal length of the camera, usually in pixels. fx for the x-direction and fy for the y-direction. Ideally, fx and fy should be equal, as most cameras have square pixels. However, in practical applications, they may differ due to reasons such as lens distortion and manufacturing errors.
-
cu and cv (cx and cy): These two parameters are the coordinates of the image center (principal point). Ideally, the principal point should be at the exact center of the image. However, in practice, it may deviate due to various reasons (e.g., lens shift, manufacturing error, etc.).
Convert a point Pc=(Xc, Yc, Zc) in the camera coordinate system to a point Pi=(u,v) in the image/pixel coordinate system. The transformation process can be expressed as:
Distortion Coefficients: Real lenses usually deviate from the ideal pinhole camera model, introducing significant distortion to images. As a result, camera parameters include Distortion Coefficients in addition to intrinsics and extrinsics. The main types of distortion are radial distortion and tangential distortion.For more detail you can refer to our course in advanced sensing and pereption course in camera model and distortion here: Camera Callibration
calibration Target- Camera calibration relies on predictably shaped and easy to localize calibration targets. Knowing the targets to identify in calibration images along with their spacing allows the optimization to reason about how the targets exist in space.Popular targets include checkerboard patterns, Aruco markers, Charuco markers, and circle grids, with potential modifications on those few.
Checkerboard patterns are simple and easy to use.OpenCV has a chessboard calibration library that attempts to map points in 3D on a real-world chessboard to 2D camera coordinates.Any object could have been used (a book, a laptop computer, a car, etc.), but a chessboard has unique characteristics that make it well-suited for the job of correcting camera distortions:
-
It is flat, so you don’t need to deal with the z-axis (z=0), only the x and y-axis. All the points on the chessboard lie on the same plane.
-
There are clear corners and points, making it easy to map points in the 3D real world coordinate system to points on the camera’s 2D pixel coordinate system.
- The points and corners all occur on straight lines and with the same space.
This tutorial uses a 8x6 checkerboard with 0.23cm squares. Calibration uses the interior vertex points of the checkerboard, so an “9x7” board uses the interior vertex parameter “8x6” as in the example below.

Figure 1: ZED stereo camera lenses and corresponding IMU coordinate frame
We will use the ZED stereo camera(Figure 1) for this experiment. The ZED camera has two lenses (left and right) that capture stereo images. We will perform intrinsic calibration for the left camera first, followed by extrinsic calibration between the left and right cameras.
There are a number of camera calibration tools available to do this calibration, but if you’re already working in ROS, one of the easier options is the camera_calibration package.
-
To start first install docker and setup environment. This docker environment installs
camera_calibrationpackage withinros2-humble.git --recurse-submodules clone git@github.com:SaxionMechatronics/slam-tutorial-practical.git cd slam-tutorial-practical/calibration/camera_calibration_ws/ docker compose up --build -d docker compose exec calibration bash --login source /opt/ros/humble/setup.bash colcon build -
The next thing we need is data for the calibration to be run on. Normally, you would be able to use a live camera feed for the intrinsic calibration, but to make this training more universally accessible and repeatable, we will be working from bag files. Download rosbag2_calibration1 file and put it
camera_calibration_ws/resourcesfolder.In the first one, run the first rosbag file on loop inside docker environment.
docker compose exec calibration bash --login cd ~/calibration_ws/resources ros2 bag play rosbag2_calibration1In the second terminal, run the camera calibration node
docker compose exec calibration bash --login source install/setup.bash ros2 run camera_calibration cameracalibrator --size 8x6 --square 0.023 \ --ros-args --remap image:=/zed/zed_node/left/color/raw/image \ --remap camera:=zed/zed_node/left/color/rawWe use the above command to calibrate the ZED camera's left lens using the raw image topic
/zed/zed_node/left/color/raw/image. The--size 8x6option specifies that the checkerboard used has 8 inner corners horizontally and 6 vertically, and--square 0.023sets the square size to 0.023 meters. The--remaparguments link the calibration node to the correct image and camera topicsnamespacerecorded in the bag file. -
You should see a pop-up. In order to get a good calibration you will need to move the checkerboard around in the camera frame such that: checkerboard on the camera's left, right, top and bottom of field of view
- X bar - left/right in field of view
- Y bar - top/bottom in field of view
- Size bar - toward/away and tilt from the camera
- checkerboard filling the whole field of view
- checkerboard tilted to the left, right, top and bottom (Skew)
a) Size bar-toward/away from the camera 
b) X bar - left/right in field of view 
c) Y bar - top/bottom in field of view 
d) Skew bar - checkerboard tilted. Figure 2: Required Camera Motions During Calibration
-
When all the 4 bars are green and enough data is available for calibration the CALIBRATE button will light up. Click it to see the results. It takes around the minute for calibration to take place.After the calibration is completed the SAVE and commit buttons light up. And you can also see the result in terminal.
A successful calibration typically has a mean reprojection error below 0.3 px.The closer to zero, the better. You will get this in the GUI as
linlabel. In our case, the GUI shows a 0.23 px error, indicating accurate calibration. -
To record these parameters down, click save.It will save to
/tmp/calibrationdata.tar.gz.Let’s get the files somewhere we can easily reach them.mkdir ~/calibration_ws/mono_camera mv /tmp/calibrationdata.tar.gz ~/calibration_ws/mono_camera cd ~/calibration_ws/src/mono_camera tar -xvf calibrationdata.tar.gz
This records all the original images used for the calibration, as well as the calibration parameters in two files: ost.txt and ost.yaml. Different applications expect intrinsics in a number of different ways, so you’ll likely have to place particular parameters from these files in a certain structure.
The camera calibration YAML file stores the camera’s intrinsic parameters for image correction.
The main parts are:
- Image size – width and height of the calibration images.
- Camera matrix (K) – defines intrinsic parameters such as focal lengths and optical center.
- Distortion coefficients – describe lens distortion for image undistortion.
- Rectification matrix (R) – aligns images to a common plane; identity for mono cameras.
- Projection matrix (P) – maps 3D camera coordinates to 2D image pixels and may differ from K after rectification.
The calibration results should be applied to the raw image so subsequent image processing can use corrected images. In ROS2, this is done in two steps:
-
Copy the calibration YAML file to
camera_pipelinepackage.This uses the calibration file to rectify the raw image asimage_recttopic.cp ~/calibration_ws/camera0_cal/calibrationdata/ost.yaml \ ~/calibration_ws/src/camera_pipeline/config/ ros2 launch camera_pipeline camera_info.launch.py image_raw:=/zed/zed_node/left/color/raw/image -
Open a new terminal and launch RViz with two image displays:
/zed/zed_node/left/color/raw/imageand/image_rect.
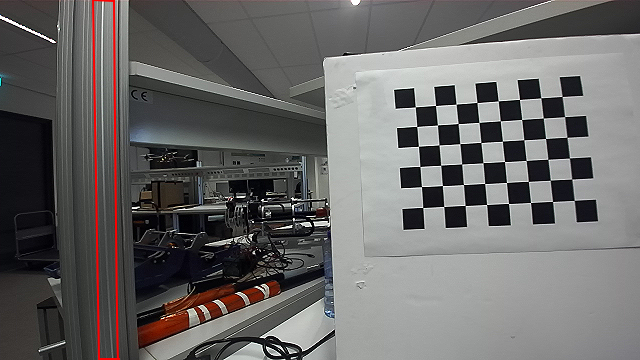
Play the rosbag and pause it with the spacebar. As illustrated in the images below, the left (raw) image appears distorted, with the vertical bar inside the red highlighted region noticeably curved. In contrast, the right (rectified) image shows the same bar as a straight line, demonstrating that the camera calibration and rectification process effectively corrected the lens distortion.
|

|
Figure 3: Comparison of Raw and Rectified Images
Extrinisic calibration
Extrinsic calibration determines the camera’s pose relative to another reference frame, such as the world, body, or another sensor (e.g., camera or LiDAR). It defines how different sensors are spatially related and enables consistent projection of points between coordinate systems. In multi-camera or sensor-fusion setups, accurate extrinsic calibration ensures proper alignment between the camera, IMU, and LiDAR, which is essential for reliable stereo vision, visual-inertial odometry, and SLAM applications.
For this experiment, we use the ZED stereo camera to perform extrinsic calibration. The goal is to estimate the relative pose of the right camera with respect to the left camera, which defines the stereo baseline — the physical separation and orientation difference between the two lenses.
The resulting extrinsic parameters (rotation R and translation T) describe how to transform points from the right camera’s coordinate frame into the left camera’s coordinate frame. These parameters are later used for stereo rectification and depth estimation.
-
First download the two provided ROS 2 bag files recoreded with the ZED stereo camera( Figure 1):
- stereo_large_board_bagfile.bag – recorded using a small checkerboard (2.3 cm squares)
- stereo_small_board_bagfile.bag – recorded using a large checkerboard (11.8 cm squares)
Place both bag files in the
camera_calibration_ws/resources/directory of the calibration workspace: -
Run the bag file and camera_calibration tool from the image_pipeline package to perform stereo calibration:
In the first one, run the first rosbag file on loop.
docker compose exec calibration bash --login cd resources/ ros2 bag play rosbag2_stereo_large_boardIn the second terminal, run the camera calibration node
docker compose exec calibration bash --login ros2 run camera_calibration cameracalibrator --approximate 0.1 --size 8x6 \ --square 0.118 --ros-args --remap left:=/zed/zed_node/left/color/raw/image \ --remap right:=/zed/zed_node/right/color/raw/image \ --remap left_camera:=zed/zed_node/left/color/raw \ --remap right_camera:=zed/zed_node/right/color/raw -
You should see a pop-up.In order to get a good calibration you will need to move the checkerboard around in the camera frame.When all the 4 bars are green and enough data is available for calibration the CALIBRATE button will light up. Click it to see the results. It takes around the minute for calibration to take place.After the calibration is completed the SAVE and COMMIT buttons light up. And you can also see the result in terminal.
-
To record these parameters down, click save.It will save to
/tmp/calibrationdata.tar.gz.Let’s get the files somewhere we can easily reach themmkdir ~/calibration_ws/resources/stereo_camera_large_board_cali/ mv /tmp/calibrationdata.tar.gz ~/calibration_ws/resources/stereo_camera_large_board_cali/ cd ~/calibration_ws/src/stereo_camera_large_board_cali tar -xvf calibrationdata.tar.gzInside the extracted folder, you will find:
left.yaml(parameters of the left camera) andright.yaml(parameters of the right camera) The structure of these files is similar to those obtained from intrinsic calibration. However, to analyze the extrinsic calibration, we focus on the projection matrices (P matrices).Left Camera Projection Matricx
data: [ 279.01721 , 0. , 318.71177, 0. , 0. , 279.01721 , 179.75161, 0. , 0. , 0. , 1. , 0. ]Right Camera Projection Matrix
data: [ 279.01721, 0. , 318.71177, -33.6074 , 0. , 279.01721 , 179.75161, 0. , 0. , 0. , 1. , 0. ]The fourth element in the first row of the right projection matrix (here
-33.6074) represents the translation of the right camera along the x-axis relative to the left camera.
This value corresponds to the baseline distance between the two camera centers when scaled by the focal length:-
f_x is in pixels (the focal length in the x-direction from the camera intrinsic matrix, here 279.01721 pixels).
-
P_14 is the element of the projection matrix that is f_x × baseline in homogeneous coordinates, but it is actually f_x × baseline with the baseline in world units (usually meters).
Mathematically: $$ \text{Baseline} = -\frac{P_{14}}{f_x}
$$Using the given data: $$ \text{Baseline} = -\frac{-33.6074}{279.01721} \approx 0.1204 \, \text{m} $$
Thus, the two cameras are separated by approximately 12.04 cm, which matches the expected ZED stereo baseline.
For parallel stereo cameras, the left and right cameras are almost perfectly aligned.This means the rotation matrix \(R\) between them is close to the identity matrix:which simplifies stereo processing.If the cameras were not parallel, a QR decomposition or SVD on a normalized version of the projection matrix can be used to to separate the rotation component
Now consider the
stereo_small_board_bagfile.bagwith a small checkerboard (--square 0.023m):data: [284.05017 , 0. , 294.69019 , -34.89335, 0. , 284.05017 , 181.08418 , 0. , 0. , 0. , 1. , 0. ]$$ \text{Baseline} = -\frac{-34.89335}{284.05017} \approx 0.123 \, \text{m} $$
Using a large checkerboard, the reprojection error is very low, less than 0.2 pixels, whereas using a small checkerboard results is a much higher error, greater than 1.2 pixels. The manufacturer-specified baseline for the ZED stereo camera is 12 cm, which is closely matched by the baseline obtained with the large checkerboard. In contrast, the high epipolar reprojection error observed with the small checkerboard indicates that this calibration is poor, and the resulting baseline does not align with the expected manufacturer value.
Epipolar reprojection error simply mean when you correct stereo images to make them perfectly aligned row-by-row (epipolar geometry), any remaining mismatch in the location of the same checkerboard corner between left and right images is measured in pixels.
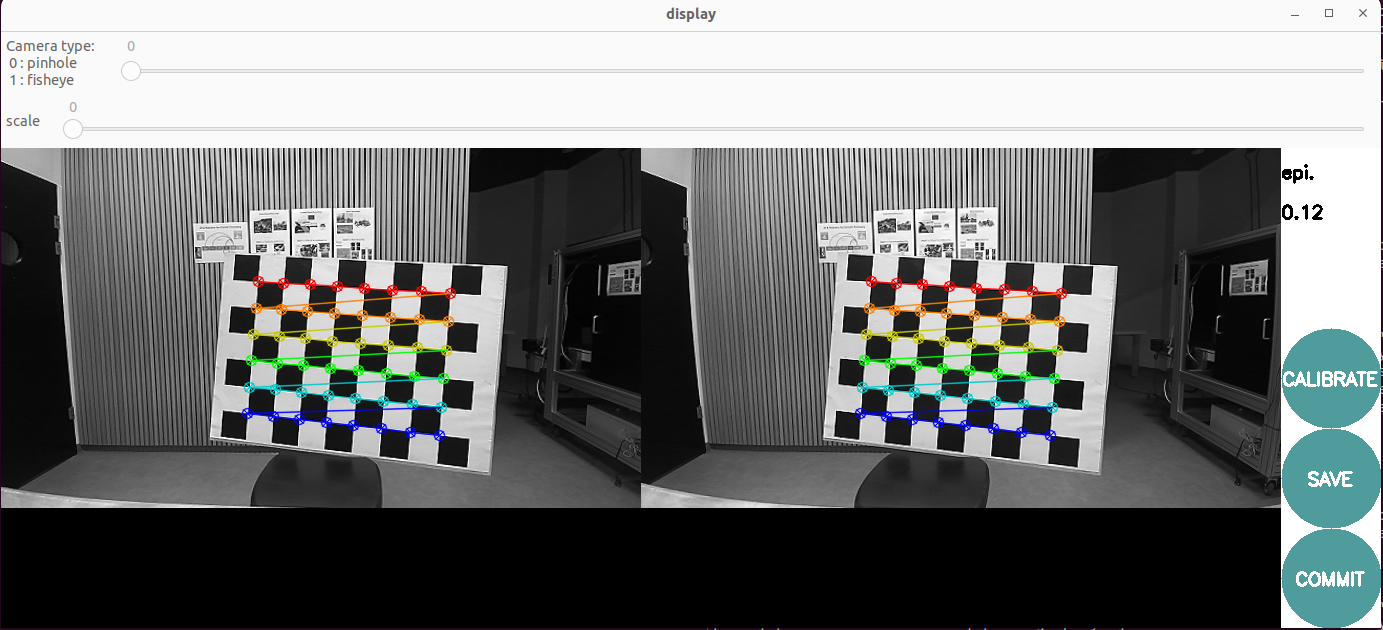
a) shows an epipolar reprojection error of 0.12 pixels 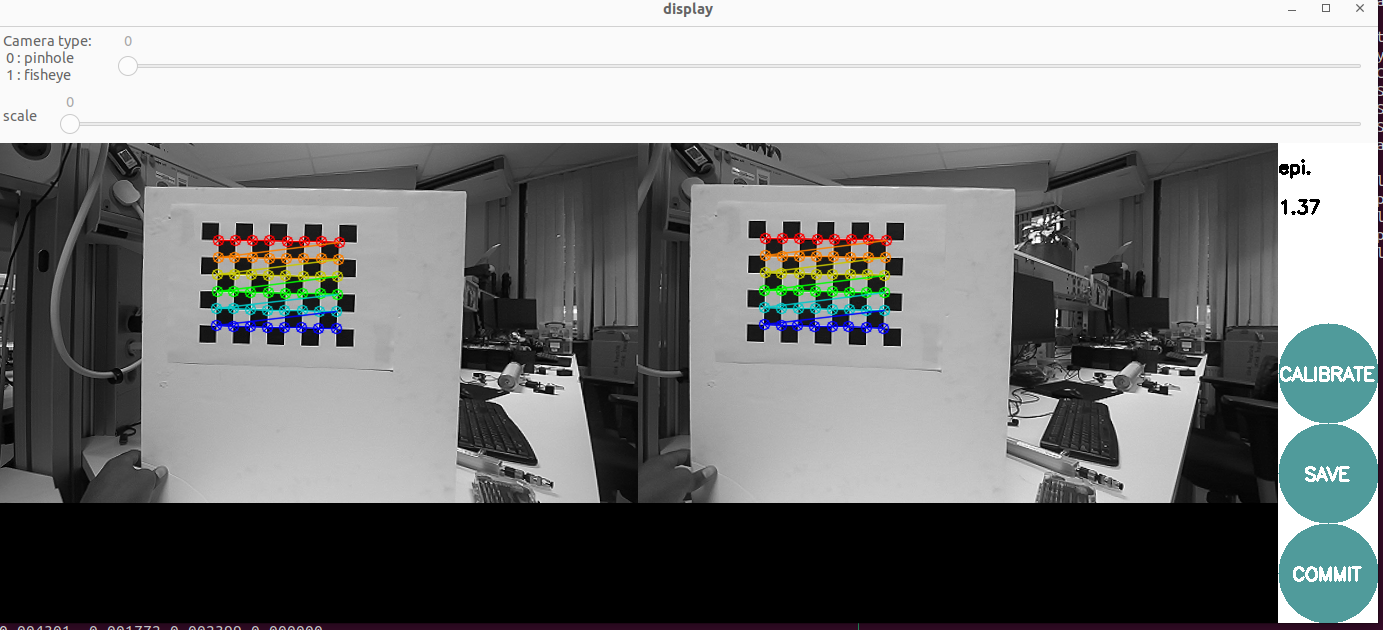
b) shows epipolar reprojection error of 1.37 pixels Figure 4: Calibration results using different checkerboard sizes
-
Camera-IMU calibration¶
The goal of camera-IMU extrinsic calibration is to accurately determine the transformation that defines the spatial relationship between the camera and the IMU.In this tutorial, we use Kalibr, a widely used tool for camera–IMU calibration. Kalibr uses motion-induced discrepancies between visual and inertial measurements of the same rigid body motion to solve for all unknown spatial, temporal, and intrinsic parameters simultaneously through continuous-time optimization. Camera tracks external AprilTag corners through projective geometry, while IMU senses internal accelerations and rotations. Calibration uses deliberate platform motion to create observable discrepancies between these measurements, revealing their spatial, temporal, and intrinsic relationships through optimization.
The following are prerequest to use Kalibr calibration tool:
A. Prepare the calibration target: Kalibr supports multiple target types, but an AprilGrid is strongly recommended. It allows partial visibility of the board while still resolving the pose correctly, making data collection easier. Before starting, print an AprilGrid from the Kalibr wiki and fill out the corresponding aprilgrid.yaml(check Kalibr yaml formats) file:
- Count the number of rows and columns, then fill in the values for tagsRows and tagsCols accordingly.
- Measure the size of one AprilTag and set it as tagSize (in meters).
- Measure the spacing (black border gap) between two tags.
- Compute tagSpacing = spacing / tagSize. For our tutoriall we will use a grid with 44 mm tags and 12.5 mm spacing.
target_type: 'aprilgrid' #gridtype
tagCols: 6 #number of apriltags
tagRows: 6 #number of apriltags
tagSize: 0.0445 #size of apriltag, edge to edge [m]
tagSpacing: 0.296 #ratio of space between tags to tagSize
codeOffset: 0 #code offset for the first tag in the aprilboard
B. Record the calibration dataset (rosbag): Record a rosbag containing IMU and camera data: To achieve accurate calibration, perform the following motions while keeping the target always in view and ensure that the calibration board can be seen from different orientations, distances, and in each part of the image plane.While recording the data, move the camera-IMU rig in a smooth and continuous manner, avoiding sudden jerks or stops. Aim for a moderate speed that allows the IMU to capture sufficient motion dynamics without causing motion blur in the camera images.
- Pitch, yaw, and roll rotations
- Up/down, left/right, forward/backward translations
- A short sequence of smooth random motion
Reference motion example: See this YouTube video as an example:
C. IMU noise parameters: Kalibr requires IMU noise parameters such as noise density and random walk. These can come from the manufacturer’s datasheet or tools, but it is recommended to compute them using an Allan variance calibration, since IMU noise characteristics can change depending on the physical setup, mounting, and environment. A convenient ROS-based Allan variance tool is available here allan_variance_ros
For our tutoriall we will use a manufacturing calibration imu parametrs.
#Accelerometers
accelerometer_noise_density: 1.4e-03 # [m/s^2 / sqrt(Hz)] continuous-time noise density
accelerometer_random_walk: 8.0e-05 # [m/s^3 / sqrt(Hz)] bias random walk
# Gyroscope
gyroscope_noise_density: 8.712683324559951e-05 # [rad/s / sqrt(Hz)] continuous-time noise density
gyroscope_random_walk: 0.0007400195811015464 # [rad/s^2 / sqrt(Hz)] bias random walk
rostopic: /zed/zed_node/imu/data_raw #the IMU ROS topic
update_rate: 100.0 #Hz (for discretization of the values above)
Save this file asimu-params.yaml, which we will use as the input for the IMU calibration. After saving it, we can follow the steps below to run the calibration inside our Docker container.
-
To start first clone the docker container along with all its submodules (kalibr packages).This will build the Docker container with ROS and all necessary dependencies for
Kalibrpackage.git --recurse-submodules clone git@github.com:SaxionMechatronics/slam-tutorial-practical.git # Clone the repository with all submodules (only if you haven't cloned it yet) cd slam-tutorial-practical/calibration/calibrationcamera_imu_cal_ws/ docker compose up --build -d -
Then opens a shell inside the Docker container, builds the Kalibr workspace and sources the setup file.
cd slam-tutorial-practical/calibration/camera_imu_cal_ws/ docker compose exec calibration bash --login catkin build -DCMAKE_BUILD_TYPE=Release -j4 source devel/setup.bashcheck all packages are installed with out error.
-
The next thing we need is data for the calibration to be run on. Normally, you would be able to use a live camera feed for the intrinsic calibration, but to make this training more universally accessible and repeatable, we will be working from bag files. Download kalib_ros.bag file and put it
camera_imu_cal_ws/resourcesfolder.Put also the configuration filesapril-grid.yamlandimu_param.yamlinside/camera_imu_cal_ws/resources.check for the bag file if it contains left and right camera topics as well as imu-raw topic.
cd resources/ rosbag info kalib_ros.bag -
The kalibr imu-camera calibration requires the intrinisic and extinisic calibration of both cameras.We can use other camera calibration and put it the Kalibr YAML format documentation or perform a new calibration using Kalibr’s camera calibration tool as foolowing command:
run the kalibr camera calibration node
rosrun kalibr kalibr_calibrate_cameras --bag resources/kalib_ros.bag --topics /zed/zed_node/left/color/rect/image /zed/zed_node/right/color/rect/image --models pinhole-radtan pinhole-radtan --target resources/april-grid.yaml --show-extractionWhen the calibration is complete (it takes many minutes according to the number of image acquired) you will get the file
kalib_ros-camchain.yamland a full PDF report of the result of the calibration inside ~/calibration_ros1_ws/resources folder.The quality of the camera calibration can be verified by inspecting the reprojection error scatter plots(Figure 5). In these plots, each point represents the difference between the detected AprilGrid corner and its projected location based on the estimated camera model.Since the points are tightly clustered around zero and the error stays below about 1.0 pixels with a Gaussian-like distribution, this indicates a good and reliable calibration.With a good calibration less than < 0.2-0.5 pixel reprojection errors is expected.
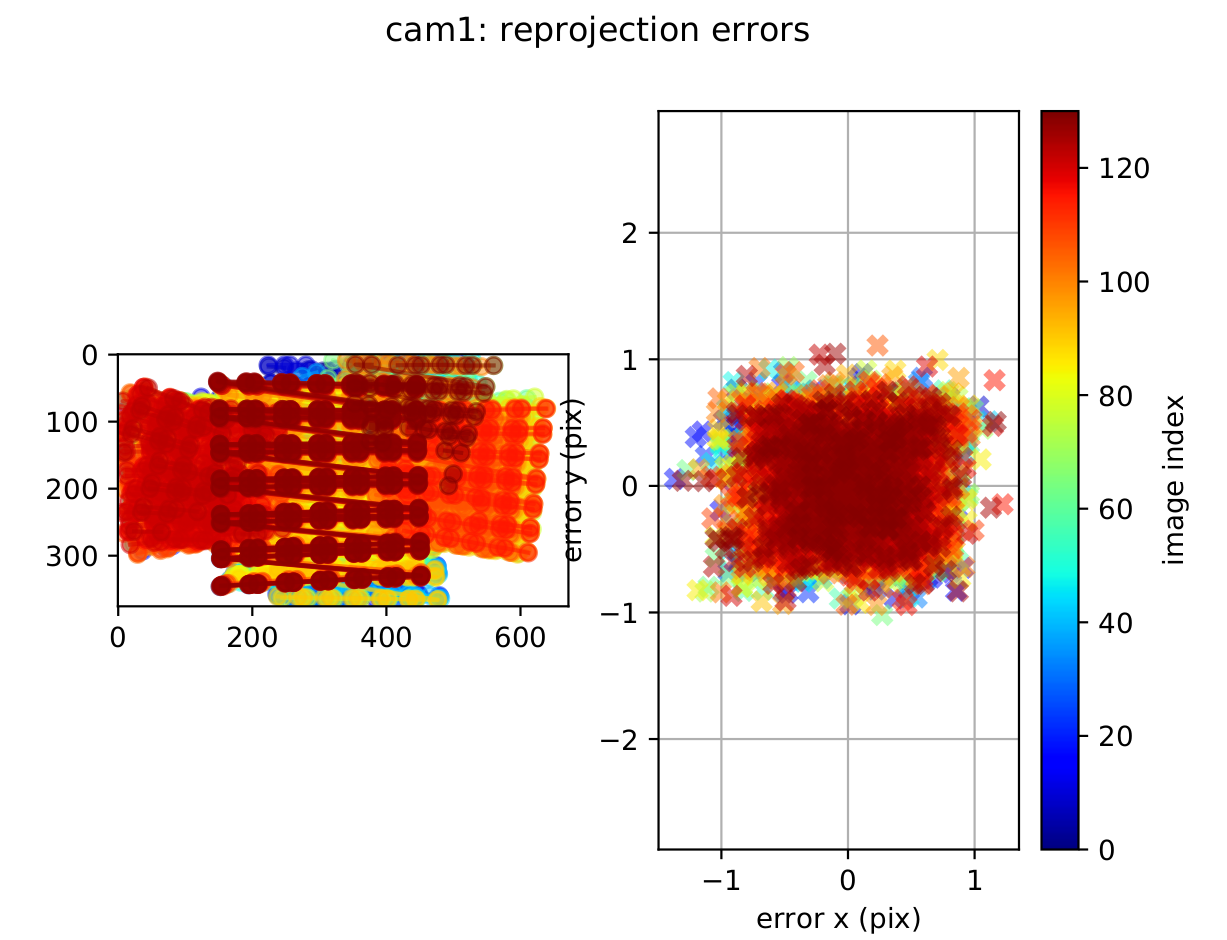
Figure 5: Camera reprojection error
-
Put the imu noise parametr as
imu-params.yamlincamera_imu_cal_ws/resources.Then run the camera-imu calibration node.
rosrun kalibr kalibr_calibrate_imu_camera \ --bag resources/kalib_ros.bag \ --cam resources/kalib_ros-camchain.yaml\ --imu resources/imu-params.yaml \ --target resources/april-grid.yamlAfter running kalibr_calibrate_imu_camera node, the camera calibration yaml will be extended by the imu-camera calibrator with imu-camera transformations.We can get also a PDF report containing the final calibration result and calibration analyses.
cam0: T_cam_imu: - [-0.006036362046665494, -0.9999239384750238, 0.010755445032163524, 0.022391610383912294] - [-0.0023433046621169074, -0.010741466983213238, -0.9999395630788445, 0.0002272267079260322] - [0.9999790354084946, -0.006061200512015419, -0.002278287043167876, 0.0028036703012263207] - [0.0, 0.0, 0.0, 1.0] cam_overlaps: [1] camera_model: pinhole distortion_coeffs: [0.013906358974869085, -0.002773924190176049, 0.0007394764683732347, 0.002260173136216226] distortion_model: radtan intrinsics: [269.91684856827334, 269.65862976049334, 342.27630954911905, 188.31594203230588] resolution: [672, 376] rostopic: /zed/zed_node/left/color/rect/image timeshift_cam_imu: 0.006180185971611793 cam1: T_cam_imu: - [0.0037000375290703325, -0.9999342469687997, 0.010854098821330815, -0.09717479095966443] - [-0.0023290320677171183, -0.010862760738228006, -0.9999382861150842, 0.00032509469131031287] - [0.9999904426202839, 0.0036745296411589967, -0.002369071549199575, 0.0027071447777197864] - [0.0, 0.0, 0.0, 1.0] T_cn_cnm1: - [0.9999525963422334, -0.00012135244900840625, 0.00973603317629399, -0.11959260895189187] - [0.00012121210899311501, 0.9999999925412439, 1.5004571660715619e-05, 9.511178288877542e-05] - [-0.00973603492451681, -1.3823735274610148e-05, 0.999952603593217, 0.00012161600222734961] - [0.0, 0.0, 0.0, 1.0] cam_overlaps: [0] camera_model: pinhole distortion_coeffs: [0.010210254705281033, -0.00061608438342638, 0.0004491938369714274, 0.00021575183132482067] distortion_model: radtan intrinsics: [270.25060851678194, 269.7455366770036, 339.396953247174, 188.0375678636518] resolution: [672, 376] rostopic: /zed/zed_node/right/color/rect/image timeshift_cam_imu: 0.006435798701052577Lets get the 3x3 rounded roation matrix from transformation matrix.
The rotation matrix tells us how the IMU is oriented relative to the camera. From this result, we can see that the IMU’s X-axis is pointing in the same direction as the camera’s forward Z-axis, meaning both sensors face the same way. The IMU’s Y and Z axes are rotated so they line up with the camera’s horizontal and vertical directions. In simple terms, the IMU is mounted in a way that its forward axis matches the camera’s viewing direction, while the other axes are rotated to properly align the two coordinate framescam0_imu:[[0, -1, 0 ] [0, 0, -1 ] [1 0, 0 ]] cam1_imu:[[0, -1, 0 ] [0, 0, -1 ] [1 0, 0 ]]Checking the translation part of the transformation matrix.
cam0_imu:[0.0223, 0, 0] cam1_imu:[-0.097, 0, 0 ] cam0_cam1:[-0.1195, 0, 0]The translation part of the transformation matrix describes how far the IMU is located from each camera. For cam0, the IMU is shifted by +0.0223 m along the X-axis, meaning the IMU sits about 2.23 cm to the right of the left camera. For cam1, the translation is −0.097 m, meaning the IMU is about 9.6 cm to the left of the right camera. When we combine these two offsets, we get the total distance between the two cameras. This value is estimated as −0.1195 m, meaning the right camera is approximately 11.95 cm to the right of the left camera, which is the stereo baseline of zed-camera(12 cm).Your accelerometer and gyroscope errors are within their 3-sigma bounds (if not then your IMU noise or the dataset are incorrect).We can check also final rotation and translation with hand-measured values.
The quality of the IMU–camera calibration can be assessed by examining the reprojection error scatter plots. A good calibration is indicated when the reprojection errors lie within the 3-sigma bounds and are tightly clustered around zero. Although some outliers may appear, fewer outliers and a stronger concentration near zero generally reflect a more accurate calibration. In our results, the majority of the points remain close to zero, showing that the calibration quality is acceptable and consistent.For more explanation
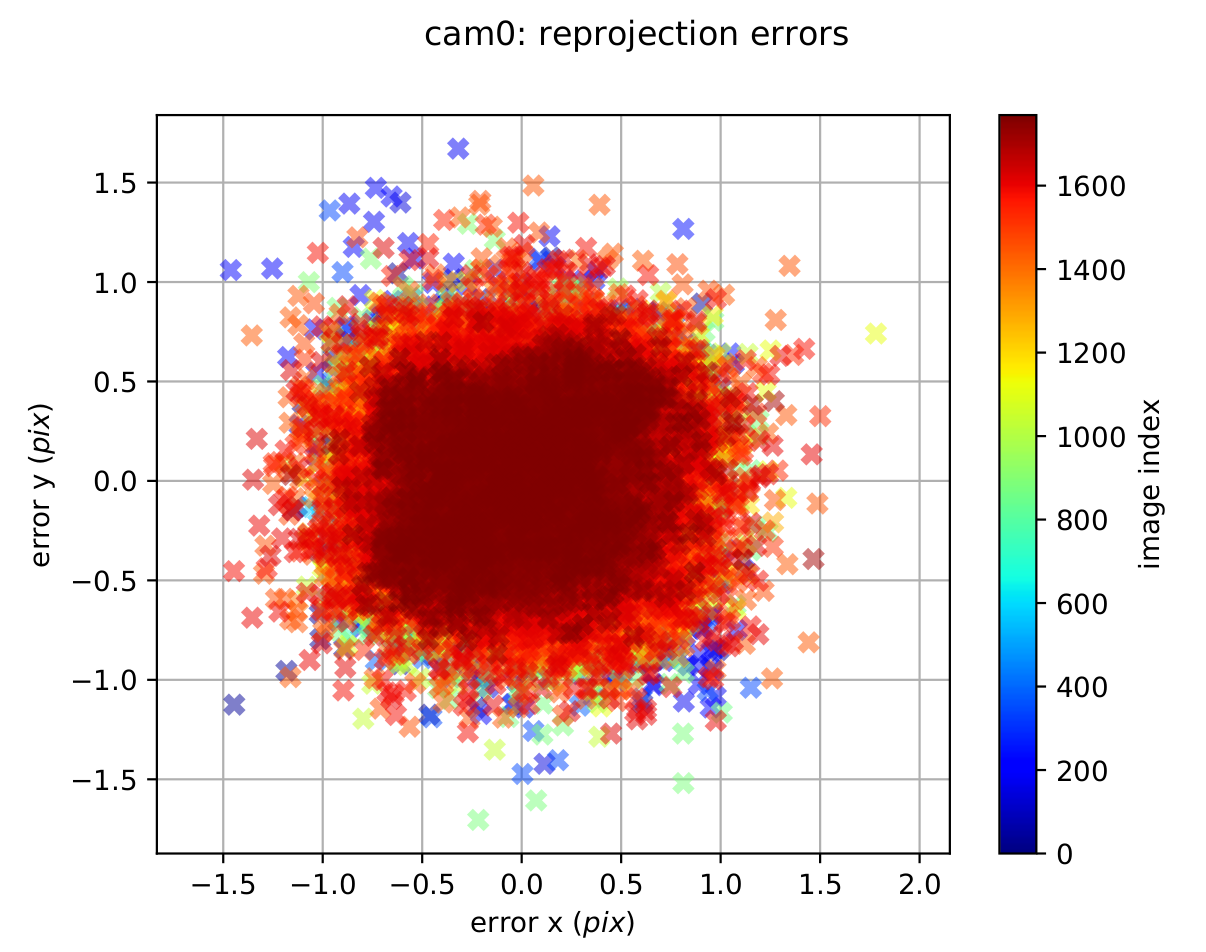
Figure 6: Camera reprojection error during Camera-Imu calibration
Check also your accelerometer and gyroscope errors are within their 3-sigma bounds (if not then your IMU noise or the dataset are incorrect). Ensure that your estimated biases do not leave your 3-sigma bounds. If they do leave then your trajectory was too dynamic, or your noise values are not good. The following figure shows angular velocity and bias error with in 3 sigma bound(red lines).
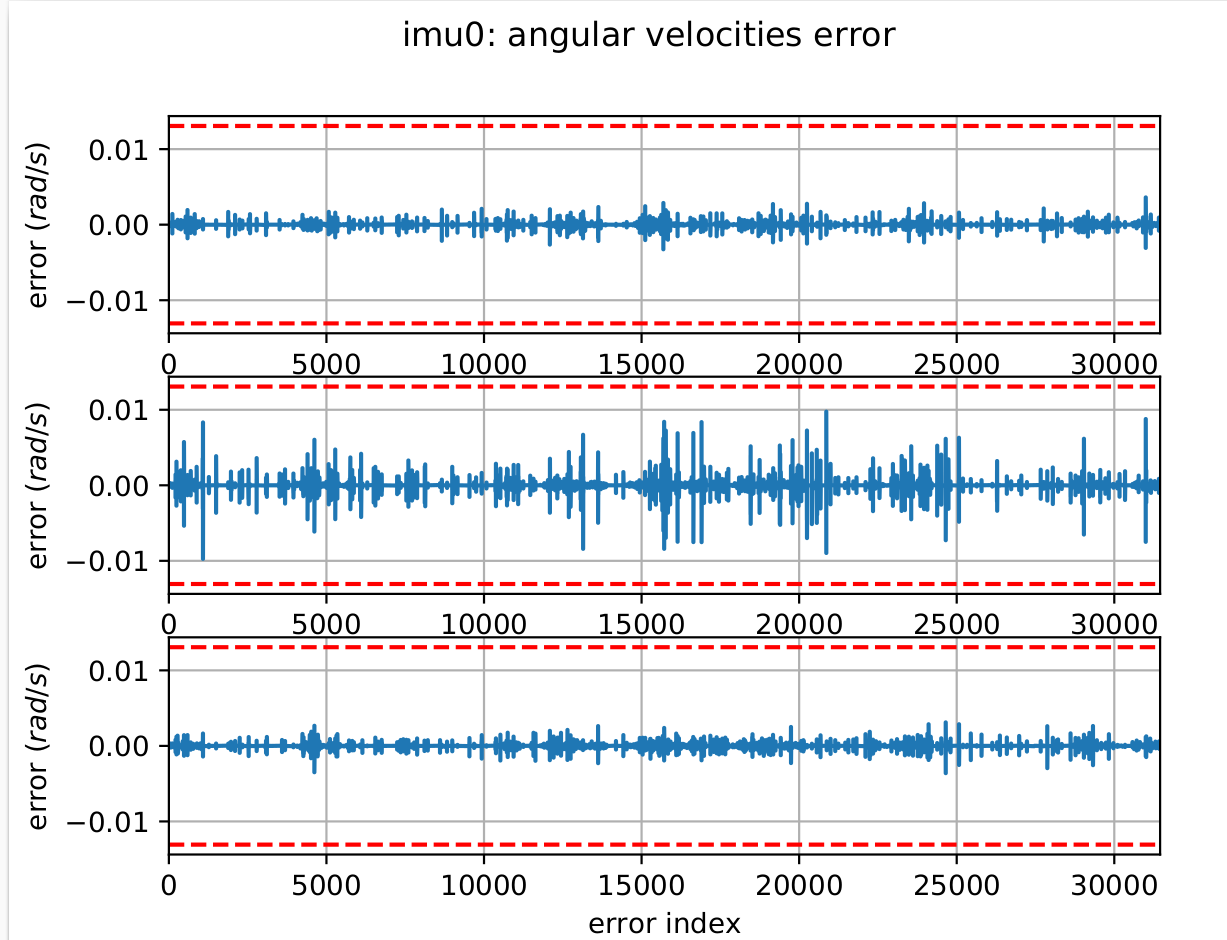
a) angular velocity error 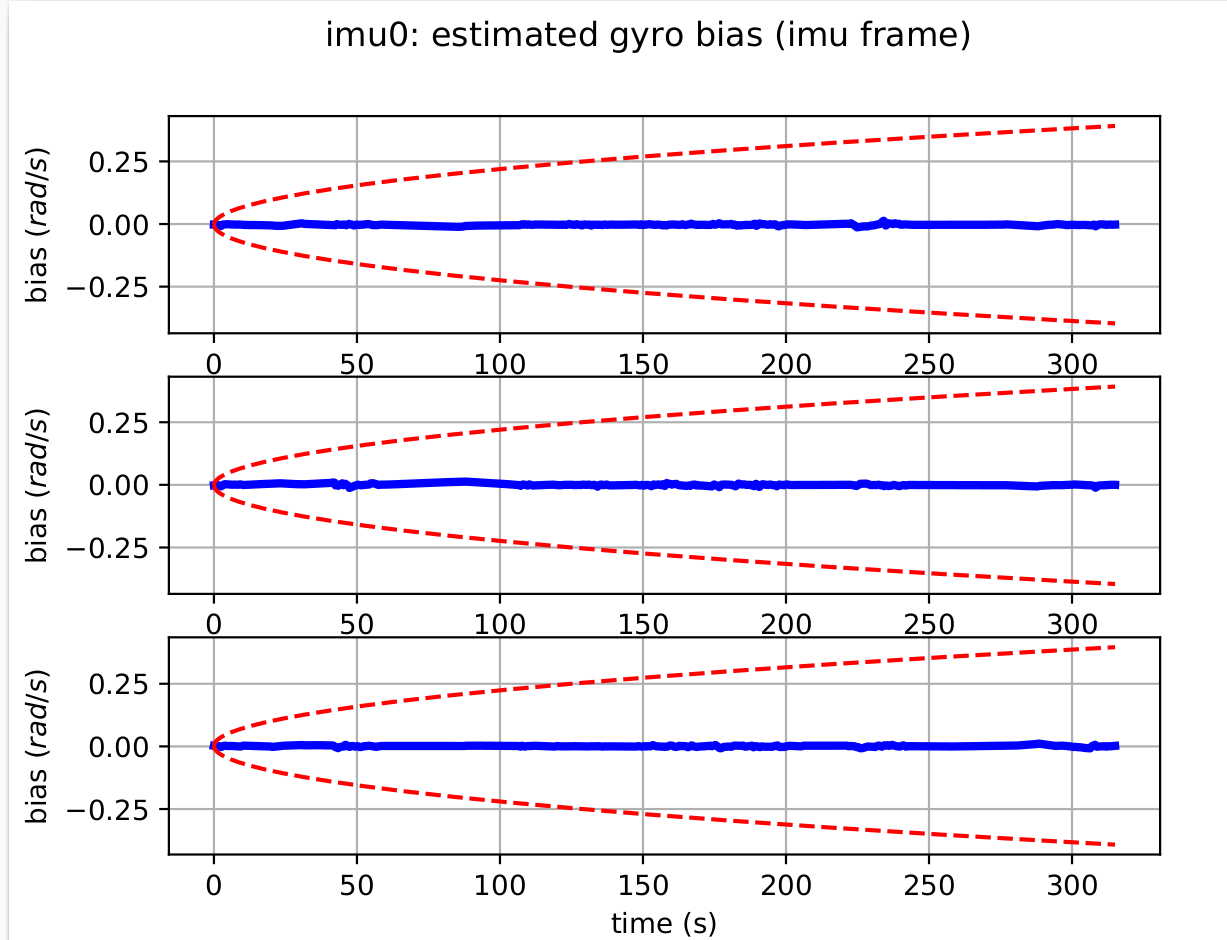
b) gyroscope bias error Figure 7: Angular velocity and bias error during Camera-Imu calibration
For more explanation about imu-camera calibration using kalibr package please refer this video tutoriall
LIDAR-IMU calibration¶
Lidar-IMU extrinsic calibration aims to determine the precise spatial relationship between a LiDAR sensor and an Inertial Measurement Unit (IMU).For this experiment, we use the LiDAR_IMU_Init package, which provides tools to callibrate temporal offset and extrinsic parameter between LiDARs and IMUs, and also the gravity vector and IMU bias. The calibration should be done in an environment with some static surfaces, without moving objects in the lidar’s field of view. When recording the bag file, the sensor box(containg the LiDAR and IMU ) must be rotated around all axes (roll, pitch, and yaw).
Follow the steps below to run the calibration inside our Docker container.
-
To start first clone the docker container along with all its submodules (LI-Init package).This will build the Docker container with ROS and all necessary dependencies for LiDAR_IMU_Init package.
2. Then opens a shell inside the Docker container, builds the workspace and sources the setup file.git --recurse-submodules clone git@github.com:SaxionMechatronics/slam-tutorial-practical.git # Clone the repository with all submodules (only if you haven't cloned it yet) cd slam-tutorial-practical/calibrationcalibrationcalibrationLidar_imu_cal_ws/ docker compose up --build -dcd slam-tutorial-practical/calibrationcalibrationcalibrationcamera_imu_cal_ws/ docker compose exec calibration bash --login catkin_make source devel/setup.bashcheck all packages are installed with out error.
-
The next thing we need data for the calibration to be run on.We will use dataset provided from in the calibration package repository. There are many dataset provided for different type of LiDAR and IMU in this link Download Hesai_apartment.bag file and put it
Lidar_imu_cal_ws/resourcesfolder.check for the bag file if it contains lidar, imu topics and thier topic names.
for this dataset the topics arecd resources/ rosbag info Hesai_apartment.bag/hesai/pandarfor lidar and/mavros/imu/data_rawfor imu. The package containes a configuration and launch file for different lidar type and their parameters. go toLidar_imu_cal_ws/src/LiDAR_IMU_Init/configfolder and check for the configuration file that matches your lidar type.For this dataset we will usepandar.yamlfile which is configured for Hesai Pandar lidar. Configure the parameters in thepandar.yamlconfig file as follows:- Thecommon: lid_topic: "/hesai/pandar" imu_topic: "/mavros/imu/data_raw " preprocess: lidar_type: 5 # Hesai PandarXT scan_line: 32 blind: 3 feature_extract_en: false initialization: cut_frame_num: 3 # must be positive integer orig_odom_freq: 10 mean_acc_norm: 9.805 online_refine_time: 10 .0 data_accum_length: 300 Rot_LI_cov: [ 0.00005, 0.00005, 0.00005 ] Trans_LI_cov: [ 0.00001, 0.00001, 0.00000001 ] mapping: filter_size_surf: 0.1 filter_size_map: 0.1 gyr_cov: 20 acc_cov: 2 b_acc_cov: 0.0001 b_gyr_cov: 0.0001 det_range: 120.0 publish: path_en: true scan_publish_en: true # false: close all the point cloud output dense_publish_en: true # false: low down the points number in a global-frame point clouds scan. scan_bodyframe_pub_en: true # true: output the point cloud scans in IMU-body-frame pcd_save: pcd_save_en: false interval: -1 # how many LiDAR frames saved in each pcd file; # -1 : all frames will be saved in ONE pcd file, may lead to memory crash when having too much frames.lid_topicandimu_topicshould match the topics in the bag file. - Thelidar_typeshould match your lidar type(check the documentation for more details about different lidar type).1is for livox series(avia, mid360 and horizon LiDAR),2is for Velodyne LiDAR ,3is for Ouster LiDAR , and5is for Hesai PandarXT. - Thescan_lineis the number of laser beams in your lidar. For Hesai PandarXT it is32. - Thecut_frame_numdetermines the numberof to split one frame into subframe to improve odom frequency and must be positive integer.Theorig_odom_freqis Original LiDAR input frequency. For most LiDARs, the input frequency is 10 Hz. -mean_acc_norm (m/s^2)is the acceleration norm when IMU is stationary. Usually, 9.805 for normal IMU, 1 for livox built-in IMU. -filter_size_surf (meter)it recommended that0.05~0.15mfor indoor scenes or0.5mfor outdoor scenes. -
First allow docker to access your display for visualization.This should be done in your host machine terminal.
4. Now we are ready to run the LiDAR-IMU calibration node.xhost +local:dockerdocker compose exec calibration bash --login roslaunch LiDAR_IMU_Init lidar_imu_init.launch \in another terminal, play the rosbag file
During calibration there are progress bars in the terminal that reach 100% when the excitation around each axis is enough. This makes sure the box is rotated sufficiently around each axis.After initialization and refinement finished, the result would be written intodocker compose exec calibration bash --login ros2 bag play resources/Hesai_apartment.bagcatkin_ws/src/LiDAR_IMU_Init/result/Initialization_result.txtThe rotation and translation parameters specify how the LiDAR sensor is physically mounted relative to the IMU, with the angles indicating a near-180-degree rotation around one z-axis. The translation vector shows the LiDAR is positioned approximately 14.13 cm forward, 4.52 cm to the left, and 10.64 cm above the IMU. The gyroscope and accelerometer biases indicate small systematic errors in the IMU measurements, which should be accounted for in sensor fusion algorithms. Overall, these parameters provide a comprehensive understanding of the spatial and temporal relationship between the LiDAR and IMU, essential for accurate data integration in robotics applications.Initialization result: Rotation LiDAR to IMU (degree) = 0.453906 -1.875376 -179.619277 Translation LiDAR to IMU (meter) = 0.116992 -0.043558 0.131183 Time Lag IMU to LiDAR (second) = 50574455.962522 Bias of Gyroscope (rad/s) = 0.000009 0.004068 0.001166 Bias of Accelerometer (meters/s^2) = -0.009681 -0.010146 -0.009607 Gravity in World Frame(meters/s^2) = -0.065864 -0.229451 -9.807095 Homogeneous Transformation Matrix from LiDAR to IMU: -0.999441 0.007135 0.032667 0.116992 -0.006872 -0.999943 0.008146 -0.043558 0.032723 0.007917 0.999433 0.131183 0.000000 0.000000 0.000000 1.000000 Refinement result: Rotation LiDAR to IMU (degree) = 0.425575 -1.947652 -179.426096 Translation LiDAR to IMU (meter) = 0.141320 -0.045165 0.106415 Time Lag IMU to LiDAR (second) = 50574455.962522 Bias of Gyroscope (rad/s) = -0.000145 -0.013387 -0.017624 Bias of Accelerometer (meters/s^2) = -0.000731 -0.002866 -0.017448 Gravity in World Frame(meters/s^2) = -0.057362 -0.222786 -9.799158 Homogeneous Transformation Matrix from LiDAR to IMU: -0.999370 0.010499 0.033905 0.141320 -0.010241 -0.999917 0.007775 -0.045165 0.033984 0.007423 0.999395 0.106415 0.000000 0.000000 0.000000 1.000000
LiDAR_IMU_Init calibration package does not provide evaluation for the calibration result.The following are some suggestion to evaluate the calibration result:
- Do the calibration multiple times with different dataset and check the consistency of the result.
- Compare the calibration result with hand-measured values of the sensor mounting or CAD model if available.
- Use the calibration result in a lidar-inertial odometry system and check the trajectory accuracy compared to ground truth.
Although LiDAR_IMU_Init supports multiple LiDAR types for calibration, if your LiDAR’s data fields differ from the formats provided by the package, you must create an intermediate (middleware) node to convert your LiDAR messages into the expected format before passing them to the calibration node.